
このノートでは、グラフ/距離行列上の 旅行商人問題(TSP) を題材に、最も素朴な系である Ant System(AS) 型のアリコロニー最適化を、クラスひとつ の実装として追う。フェロモン と ヒューリスティック(距離の逆数) から決まる遷移確率を見ながら、複数のアリエージェントが どの都市へ進みやすいか を図として理解することをねらう。
群知能の整理と PSO との対比は、第4回・§2(群知能アルゴリズムの例) と §3(PSO)、および 外部まとめ(PSO/ACO) が参考になる。組合せ最適化の位置づけは 第1回・導入 を参照。
0. このノートで学ぶこと¶
Ant System で用いられる フェロモン と 蒸発率 が探索に与える意味。
アリが 未完走のとき に、未到達の都市 へ進む離散確率が、後述の 式 (2) とどう対応するか。
一周が終わったあと(全アリがツアーを完成させたあと)にだけ起きる 蒸発と堆積 と、コードの対応。
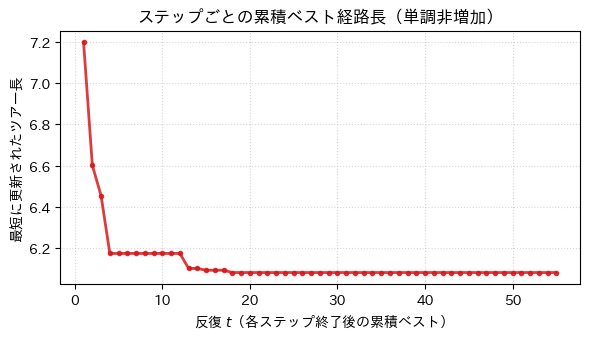
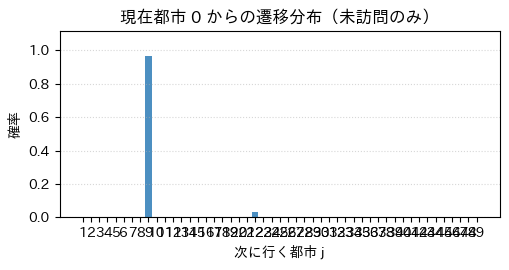
可視化 として、(a) 辺フェロモン の強弱、(b) ある一歩で どの次ノードが選ばれやすいか、(c) 反復による 最短ツアー長の推移 を読む。
ヒューリスティクスゆえに 最適解の保証はない こと、および パラメータ依存 に触れる。
同一インスタンスの TSP を ACO と PSO で解く 課題の手順(§7(課題))。
1. はじめに:なぜ ACO が「順路」を扱うのか¶
アリコロニー最適化(ACO) は、アリが フェロモンという痕跡 を辺に残し、それを後続のアリが参照するという 正のフィードバック をモデル化した手法である。第4回ノートの §2 で短く触れた直感――短い経路ほど往来が速く、その辺にフェロモンが溜まりやすい――を、離散グラフに写像したものとして捉えるとよい。
ここでの エージェント は「アリ」である。ひとりのアリは 都市の順列をランダムに増築 していく。皆さんはどう思うだろうか? 一見、単なるランダムウォークに見えるが、多数のアリの試行 と 時間方向の更新 が重なることで、有望な辺に探索のバイアスがかかる。
Wikipedia(日本語)「蟻コロニー最適化」の解説(その中でこの図が例として使われる。画像本体は Wikimedia Commons) である。蜂蜜(少数・高評価) と 薄い糖水(多数・評価は低め) の前で、コロニーとしてどこに資源を集中させるかをアリが表しており、「制約つきで良い選択を並べる」ところが 組合せ最適化と橋渡しできる比喩 である。

クレジット: Commons — File:Knapsack ants.svg(Inkscape で作成、Dake)CC BY-SA 2.5。
……イメージを言葉で(式に入る前に)¶
ふわっとした見立て だけ先に書いておく。アリは教室で頭をひねって「最短になる定理」を議論しているわけではない。それでも往来の結果として、経路沿いにはかすかな 痕跡(フェロモン)が残り、その痕跡に そっと引き寄せられる ような足どりが続く。この「環境側のメモ」「足の側のゆるやかさ」だけを心にとめてほしい。
図にある 蜂蜜と糖水 は、問題設定が違うが ニュアンス は近い。こちら側に足が寄りやすい、評価の高い側に協調した探索が張りつきやすい、という光景を頭の映画で見ておけると、このあとの式読みが楽になる。このノートの TSP では「甘さ」そのものではなく 距離の短さがよい評価 になっているだけだという点だけ、取り換えなくてよい。
蒸発 は、痕跡が 過去の成功だけに張りつき続けない よう時間をゆるめる働きと捉えることができる。堆積 は、ひとたちが実際に歩いたあとに、環境が ログを増幅する ところにある。
つぎに 記号だけに切り替えて、「痕跡」が で、「ゆるめる」が で、「評価のよい試行ほど増える」が としてどう並ぶかを書く。皆さんはどう思うだろうか? 式は冷たく見えるが、いまの映画の 言い換え にすぎないのだ、と思いながら読んでもらえれば十分である。
2. 対称 TSP と Ant System の式¶
2.1 問題¶
頂点を と番号付け、その上の対称ネットワークを距離行列 で与える。プログラム上は、この を並べた n\times n の NumPy 配列 dist とみなせばよい。成分 dist[i, j] が数学の に対応する(インデックスは 0 始まりで慣れた形にしている)。
対角 は「都市 から自分へ」という辺であり、順路構築の途中で不必要に選ばれないように、実装では np.inf のような 十分大きな数 で埋める。それ以外も非負であるとしてよい。このノート末尾の demo では、各都市に座標ベクトル xy[k](単位正方形上の実ベクトル)を与え、(ユークリッド距離)として dist を組み立てる。その場合も、距離算出のあと np.fill_diagonal(dist, np.inf) の一行が式の と対応する。
目標は、各頂点をちょうど一度ずつめぐって戻ってくる ハミルトン閉路 のうち、全辺の距離の和 が最小になるものを近似して求めることである。
2.2 ヒューリスティック情報とは何か¶
ヒューリスティック情報 は、距離だけから計算できる 問題固有の係数 である。役割は一つだけであり、フェロモンがまだ弱いときでも「無粋にも近そうな辺へ足を運びやすい」ような 事前バイアス を式 (2) の分子につけることにある。 が 大きいと へ進む質量が上がり、距離だけ見れば greedy に近い行動になりやすい。
式 (2) でいう がそのスイッチである。クラス AntColonyTSP では、_move_weights の中で毎回 eta = 1.0 / max(self._eps, self._dist[i, j]) として 別配列としては保持せず都度算出しているが、数理モデルとしての は常にこの式である。
はゼロ除算だけを避けるための微小な正である(距離そのものとは独立に課した安全装置である)。
2.3 状態 とプログラム上の対応物¶
順序付きペア に非負の フェロモン を載せる。ここで は アルゴリズムの離散反復 を数えるカウンタと思えばよい(実装上は「カウンター変数」としては明示せず、iterate() を繰り返すたびに配列だけが書き換わっている)。
対称な TSP では、環境側のモデルでも実装でも と に同値のフェロモン を載せてよい。このノートでは tau と名付けられた dist と同じ形の正方配列 self._tau が のスナップショットであり、tau[i,j] が に対応する。初期状態では 全要素を小さな正の定数 (例:1e-6)で埋め、iterate() の末尾で まず全域に蒸発、そのあと複数のアリによる堆積が加わって更新されていく。
plot_state の右側に示すヒートマップは、まさにこの正方行列 colony.tau を画像化したものである。
2.4 ツアー構築と遷移確率のコード対応¶
反復の内部で、アリ が現在都市 にいるとする。まだ一度も訪れていない頂点だけを許可された次候補 とする(始点への戻りは、順路が一周する直前だけ必要になるので、コードでは閉じたリストの 最終辺 として処理している)。
外への確率質量はゼロとする。build_tour メソッドは、この正規化分布に従って numpy.random.choice で次の都市を引き、リストに追加していくだけである。_move_weights が式 (2) に対応する 未正規化の重みベクトル を返している。
係数 はフェロモンを読む強さ、 は距離ヒューリスティックを読む強さである。 とは別次元であり、どちらも「探索と強い引き込み」のトレードオフには効くが、意味は異なるので混同しないようにしたい。
2.5 蒸発と堆積¶
まず蒸発。 とする。
実装上は iterate のフェロモン更新の冒頭で self._tau *= (1.0 - self._rho) の一行として現れる。行列の すべての成分 が一括で減衰する。
次に、この反復でアリ が得た順路長を 、定数 を用いて
として堆積し、すべてのアリについて和をとる:
対称な TSP なので、順路が辺 を使えばコードでは tau[a,b] と tau[b,a] に同じ量 を足してよい。短い順路ほど が大きいため、質のよい試行ほど環境側のログが濃く残るように設計されている。式の順序としては、(3) のあとに (5) を足せば、このノートの実装そのものである。
記述の順序は文献によって前後することがあるが、**「複数試行してから環境だけを更新する」**という骨格だけは共通である。
3. Ant System の疑似コード¶
ALGORITHM AntSystemSymmetricTSP
入力: 距離行列 d(対称・非負), アリ数 M, 反復回数 K
パラメータ α>0, β>0, ρ∈(0,1), Q>0
出力: 見つかった最良の閉ツアー π* とその長さ L*
τ を小さな正で初期化する
L* ← +∞
for t ← 1 to K
trials ← 空
for k ← 1 to M
開始都市を選ぶ(一様乱数など)
未到達が空になるまで、式 (2) に従い次都市を多項分布からサンプル
始点へ戻る辺を含めた閉路 π と長さ L を求める
trials に (π, L) を追加
if L < L* then L* ← L, π* ← π
式 (3) で全辺を蒸発させる
trials に含まれる各ツアーについて式 (4)(5) で τ に堆積(対称なら両方向へ)
返す π* と L*並列処理の順序や、開始都市の与え方、局所探索の併用などは アルゴリズム亜種(ACS・MMAS など) で変わりうる。このノートは AS の骨格 に焦点を絞っている。
4. 実装:AntColonyTSP と可視化¶
この資料では、コードの説明文はすべて「そのコードセルの直前の Markdown セル」にのみ書いてある。 ここには節としての見出しと、セルの並びだけを示す。
実行は §4.1 の Markdown のすぐ下のセルから、順に実行するとよい。
§4.1 ライブラリの読み込み → (コードセル)
§4.2 TSP をどうコード化しているか(Markdown のみ:
distと逐次構築)§4.3 核
AntColonyTSP→ (コードセル)§4.4 描画ヘルパ → (コードセル)
§4.5 まとめて試す
demo→ (コードセル)
4.1 ライブラリの読み込み¶
NumPy で距離行列や乱数を扱い、Matplotlib で地図・行列・アニメーションを描く。日本語の軸ラベルやタイトルが化ける環境では matplotlib-fontja を試し、利用できなければサンセリフ系フォントに退避する。このセルを最初に実行しておくと、以降のセルで np や plt が未定義になる事故を防げる。
Google Colab で日本語フォントだけ不足しているときは、このマークダウンより上にコードセルを挿入して !pip install matplotlib-fontja を一度走らせてもよい(本リポジトリの pyproject.toml にも同パッケージを記してある)。
"""対称 TSP 上の Ant System(AS)をシンプルなクラスで実装する。"""
from __future__ import annotations
import math
import matplotlib.pyplot as plt
import numpy as np
from matplotlib import animation
try:
import matplotlib_fontja # noqa: F401
matplotlib_fontja.japanize()
except Exception:
plt.rcParams["font.family"] = "sans-serif"
4.2 このノートにおける TSP のコーディング(GA/PSO で手こずりやすい点との違い)¶
問題インスタンスは、都市番号 と n\times n の距離行列 dist だけで与えている。 座標 xy が出てくるのは demo が幾何から dist を組み立てる便宜にすぎず、AntColonyTSP は _dist にしか依存しない。 これは重み付き完全グラフとしての TSP をそのままコード化した形である。
**解(ツアー)**は、順列染色体や連続ベクトルではなく、build_tour が構築する list[int] の閉じた順路(例:[3,1,4,2,0,3])。visited という真偽ベクトルで未訪問を管理し、式 (2) に従って 合法な次都市だけから numpy.random.choice で進む 逐次構築である。長さは 隣接ペアを dist[a,b] で足すだけである。
ここが GA や PSO で TSP を実装するときに比べて楽な点である。 GA では順列を染色体にすると、雑な交叉は 都市の重複や取りこぼしを生み、順列専用の交叉(OX/PMX など)や修復が必要になりやすい。PSO はもともと連続ベクトル上の更新であり、TSP のように 離散の順序 を直接は扱えず、第4回ノート で触れたように Random Keys や別表現で「粒子 順路」へ写像する工夫がレイヤとして要る。
それに対して本ノートの Ant System は allowed = ~visited で候補を切り、構築途中は常にハミルトン路のまま進む。順路制約を 事後的に満たすルーチンを書かなくてよい点が、コード量とデバッグのしやすさにつながっている。
以下はそのコアであり、直後のコードセルにある build_tour がこの流れをそのまま実装している。
visited = np.zeros(n, dtype=bool)
path = [start]
visited[start] = True
cur = start
while visited.sum() < n:
allowed = ~visited
w = self._move_weights(cur, allowed) # 式 (2) に相当する重み(正規化前)
idx = np.flatnonzero(allowed)
pj = w[idx] / w[idx].sum()
nxt = int(self._rng.choice(idx, p=pj))
path.append(nxt)
visited[nxt] = True
cur = nxt
path_closed = path + [path[0]]
length = float(sum(self._dist[a, b] for a, b in zip(path_closed, path_closed[1:])))4.3 核:AntColonyTSP(Ant System のそのままの実装)¶
内部に距離行列 _dist とフェロモン行列 _tau を持つ。_move_weights と build_tour が、式 (2) に相当する確率質量へ従って未到達都市へ順に進む部分である。iterate は疑似コードどおりに、複数アリのツアー生成 → 反復最短の記録 → 蒸発 () → に比例した堆積までをひとつの反復としてまとめる。step_probabilities は「いまこの一歩で式 (2) は何を言っているか」を棒グラフ用に取り出す窓口にすぎない。
class AntColonyTSP:
"""Ant System による対称 TSP の近似(距離行列のみを見る)。"""
def __init__(
self,
dist: np.ndarray,
*,
n_ants: int = 20,
alpha: float = 1.0,
beta: float = 4.0,
rho: float = 0.5,
q: float = 100.0,
tau_init: float | None = None,
eps: float = 1e-9,
seed: int | None = 0,
) -> None:
self._dist = np.asarray(dist, dtype=float)
if self._dist.ndim != 2 or self._dist.shape[0] != self._dist.shape[1]:
raise ValueError("dist は正方行列である必要がある")
self._n = int(self._dist.shape[0])
self._alpha = float(alpha)
self._beta = float(beta)
self._rho = float(rho)
self._q = float(q)
self._eps = float(eps)
self._n_ants = int(n_ants)
self._rng = np.random.default_rng(seed)
t0 = 1e-6 if tau_init is None else float(tau_init)
self._tau = np.full_like(self._dist, t0)
@property
def tau(self) -> np.ndarray:
return self._tau
def _move_weights(self, i: int, allowed: np.ndarray) -> np.ndarray:
w = np.zeros(self._n)
idx = np.flatnonzero(allowed)
if idx.size == 0:
return w
t = np.maximum(self._tau[i, idx], 1e-12)
eta = 1.0 / np.maximum(self._eps, self._dist[i, idx])
w[idx] = (t**self._alpha) * (eta**self._beta)
s = float(w.sum())
if s <= 0.0:
w[idx] = 1.0 / idx.size
return w
return w / s
def build_tour(self, start: int | None = None) -> tuple[list[int], float]:
"""クローズドツアーをランダム逐次生成し、長さを返す。"""
n = self._n
if start is None:
start = int(self._rng.integers(0, n))
visited = np.zeros(n, dtype=bool)
path: list[int] = [int(start)]
visited[start] = True
cur = int(start)
while visited.sum() < n:
allowed = ~visited
w = self._move_weights(cur, allowed)
idx = np.flatnonzero(allowed)
if idx.size == 0:
break
pj = w[idx]
pj = pj / pj.sum()
nxt = int(self._rng.choice(idx, p=pj))
path.append(nxt)
visited[nxt] = True
cur = nxt
path_closed = path + [path[0]]
length = 0.0
for a, b in zip(path_closed, path_closed[1:]):
length += float(self._dist[a, b])
return path_closed, length
def step_probabilities(self, i: int, visited: np.ndarray) -> tuple[np.ndarray, np.ndarray]:
"""可視化用:現在ノード i から次に行けるノードの確率を返す。"""
allowed = ~visited
w = self._move_weights(i, allowed)
idx = np.flatnonzero(allowed)
pj = w[idx]
if pj.sum() > 0:
pj = pj / pj.sum()
return idx.astype(int), pj
def iterate(self) -> tuple[float, list[int], list[tuple[list[int], float]]]:
"""1 反復:全アリがツアーを作り、最短を記録し、τ を更新する。"""
trials: list[tuple[list[int], float]] = []
best_l = math.inf
best_path: list[int] | None = None
for _ in range(self._n_ants):
path, length = self.build_tour()
trials.append((path, length))
if length < best_l:
best_l = length
best_path = list(path)
assert best_path is not None
self._tau *= 1.0 - self._rho
for path, length in trials:
contrib = self._q / max(length, self._eps)
for a, b in zip(path, path[1:]):
self._tau[a, b] += contrib
self._tau[b, a] += contrib
return best_l, best_path, trials
def run(self, n_iter: int) -> tuple[list[float], list[int]]:
"""反復を繰り返し、各反復末のグローバルベスト長の履歴を返す。"""
hist: list[float] = []
global_best = math.inf
global_path: list[int] = []
for _ in range(n_iter):
b_l, b_p, _ = self.iterate()
hist.append(b_l)
if b_l < global_best:
global_best = b_l
global_path = b_p
return hist, global_path4.4 描画ヘルパ(地図・アニメ・意思決定バー)¶
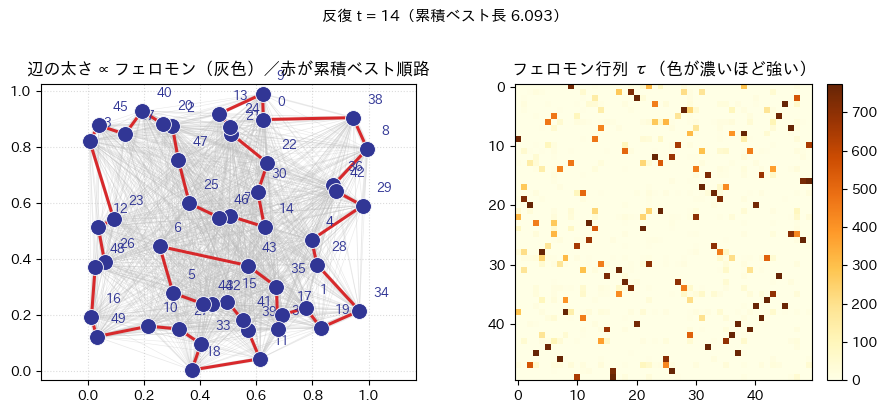
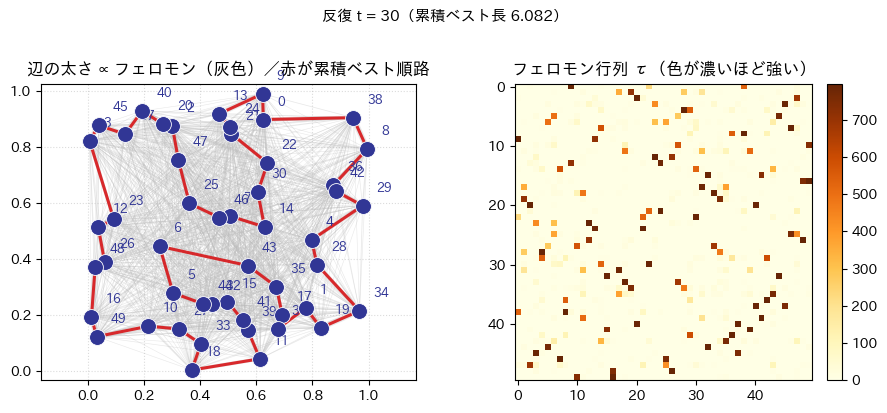
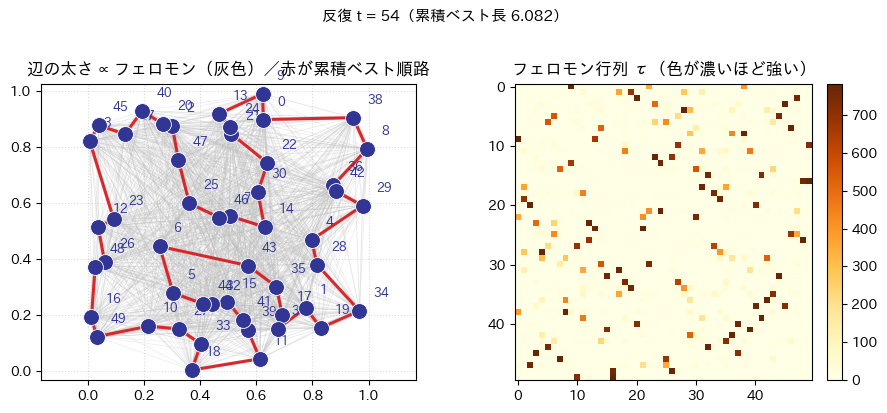
plot_state:左パネルで全辺に薄い灰色を敷き、その太さでフェロモンの相対強度を表す。赤の閉路がその時点での累積ベスト順路である。右は のヒートマップである。draw_cumulative_best_tour/show_best_tour_evolution_animation:反復インデックスに同期して、累積ベスト経路の形がどう入れ替わるかをFuncAnimationで再生する。ノートブックではto_jshtml()でブラウザ内プレーヤに埋め込む想定である。plot_decision_bar:未完走の状態で、式 (2) が与える次都市の確率を棒グラフにする。
いずれも厳密解の証明ではなく、挙動の説明のためのコードである。
def plot_state(
xy: np.ndarray,
colony: AntColonyTSP,
best_path: list[int],
title: str,
iteration_label: str,
) -> plt.Figure:
fig, axes = plt.subplots(1, 2, figsize=(9.0, 4.0))
axm, axh = axes
tau = colony.tau
tnorm = tau / max(tau.max(), 1e-12)
n = xy.shape[0]
for i in range(n):
for j in range(i + 1, n):
lw = 0.4 + 3.8 * float(tnorm[i, j])
axm.plot(
[xy[i, 0], xy[j, 0]],
[xy[i, 1], xy[j, 1]],
color="#bdbdbd",
lw=lw,
alpha=0.35,
)
bp = best_path[:-1]
nbp = len(bp)
for k in range(nbp):
a = bp[k]
b = bp[(k + 1) % nbp]
axm.plot([xy[a, 0], xy[b, 0]], [xy[a, 1], xy[b, 1]], color="#d7191c", lw=2.2, alpha=0.92)
axm.scatter(xy[:, 0], xy[:, 1], c="#313695", s=130, zorder=5, edgecolor="white", linewidths=0.6)
for kk, (x, y) in enumerate(xy):
axm.text(x + 0.05, y + 0.05, str(kk), fontsize=9, color="#313695")
axm.set_aspect("equal", adjustable="datalim")
axm.set_title(title)
axm.grid(True, linestyle=":", alpha=0.45)
im = axh.imshow(tau, cmap="YlOrBr", aspect="equal")
axh.set_title("フェロモン行列 τ(色が濃いほど強い)")
fig.colorbar(im, ax=axh, fraction=0.046, pad=0.04)
fig.suptitle(iteration_label, fontsize=11, y=1.02)
fig.tight_layout()
return fig
def draw_cumulative_best_tour(
ax: plt.Axes,
xy: np.ndarray,
path_closed: list[int],
step_t: int,
cum_best_length: float,
) -> None:
"""各反復の「累積ベスト」の閉路だけを単純に描画する(アニメーション用)。"""
ax.clear()
n = xy.shape[0]
bp = path_closed[:-1]
nb = len(bp)
if nb >= 2:
for k in range(nb):
a, b = bp[k], bp[(k + 1) % nb]
ax.plot(
[xy[a, 0], xy[b, 0]],
[xy[a, 1], xy[b, 1]],
color="#d7191c",
lw=2.4,
alpha=0.95,
zorder=2,
)
ax.scatter(
xy[:, 0],
xy[:, 1],
c="#313695",
s=140,
zorder=5,
edgecolor="white",
linewidths=0.7,
)
for i, (x, y) in enumerate(xy):
ax.text(float(x + 0.04), float(y + 0.04), str(i), fontsize=9.5, color="#313695", zorder=6)
ax.set_aspect("equal", adjustable="datalim")
ax.grid(True, linestyle=":", alpha=0.45)
ax.set_xlabel("$x$")
ax.set_ylabel("$y$")
ax.set_title(
"累積ベスト順路 "
rf"反復 $t={step_t}$ 終了直後 長さ $={cum_best_length:.4f}$"
)
def show_best_tour_evolution_animation(
xy: np.ndarray,
paths_hist: list[list[int]],
cum_lengths: list[float],
*,
interval_ms: int = 240,
figsize: tuple[float, float] = (6.2, 5.8),
repeat: bool = True,
) -> None:
"""反復ステップごとに累積ベスト順路がどう見えるか ``FuncAnimation`` で再生する。
Jupyter / Google Colab では ``IPython.display.HTML(anim.to_jshtml())`` を優先する。
"""
fig, ax = plt.subplots(figsize=figsize)
plt.tight_layout()
def _update(ti: int) -> None:
draw_cumulative_best_tour(ax, xy, paths_hist[ti], step_t=ti, cum_best_length=float(cum_lengths[ti]))
_update(0)
ani = animation.FuncAnimation(
fig,
_update,
frames=len(paths_hist),
interval=interval_ms,
repeat=repeat,
blit=False,
)
try:
from IPython.display import HTML, display
from IPython import get_ipython as _ipython_get_ipython
except ImportError:
_ipython_get_ipython = None
if _ipython_get_ipython is not None and _ipython_get_ipython() is not None:
html = ani.to_jshtml(default_mode="loop" if repeat else "once")
plt.close(fig)
display(HTML(html))
return
plt.close(fig)
nfr = len(paths_hist)
k = min(nfr, 8)
axes_idx = sorted({min(nfr - 1, max(0, int(round(j)))) for j in np.linspace(0, nfr - 1, k)})
ncol = 4
nrow = int(math.ceil(len(axes_idx) / ncol))
fig_strip, axes_ar = plt.subplots(nrow, ncol, figsize=(3.0 * ncol, 3.3 * nrow))
flat_axes = np.atleast_1d(axes_ar).ravel()
for kix, ti in enumerate(axes_idx):
draw_cumulative_best_tour(
flat_axes[kix],
xy,
paths_hist[ti],
step_t=ti,
cum_best_length=float(cum_lengths[ti]),
)
for j in range(len(axes_idx), flat_axes.size):
flat_axes[j].set_visible(False)
fig_strip.suptitle("環境によっては JS が使えないため、複数ステップを静止画で並べる", fontsize=10)
fig_strip.tight_layout()
plt.show()
plt.close(fig_strip)
def plot_decision_bar(
colony: AntColonyTSP,
current: int,
visited: np.ndarray,
ax: plt.Axes | None = None,
) -> plt.Axes:
if ax is None:
_, ax = plt.subplots(figsize=(5.0, 2.8))
idx, pj = colony.step_probabilities(current, visited)
labs = [str(int(j)) for j in idx]
ax.bar(labs, pj, color="#2c7bb6", alpha=0.85)
ax.set_ylim(0.0, max(0.08, float(pj.max()) * 1.15))
ax.set_xlabel("次に行く都市 j")
ax.set_ylabel("確率")
ax.set_title(f"現在都市 {current} からの遷移分布(未訪問のみ)")
ax.grid(True, axis="y", linestyle=":", alpha=0.5)
return ax
4.5 まとめて試す:demo¶
単位正方形内に n_node 個の都市をランダムに撒き(乱数種は seed)、ユークリッド距離の対称 TSP のインスタンスをつくる。iterate を所定回数だけ回し、その途中のフェロモン+ベスト順路を静止画で抜き、続けてベスト順路の変形アニメ、単調に下がっていく累積ベスト長、最後に都市 0 からの遷移分布を表示する。
読みかたのヒント:n_node や n_ants を変えると探索の難しさと更新の速さのトレードオフが変わる。セル末尾の demo() を実行すると図がまとめて出力される。
def demo(seed: int = 7,n_node: int = 50, n_ants: int = 32) -> None:
"""ユークリッド TSPを実行.都市をランダム配置で試し、収束の様子を観る。"""
rng = np.random.default_rng(seed)
xy = rng.uniform(0, 1, size=(n_node, 2))
dist = np.linalg.norm(xy[:, None, :] - xy[None, :, :], axis=-1)
np.fill_diagonal(dist, np.inf)
# 探索空間が大きいのでアリ数と反復をやや増やす(体感で「更新が続く」ようにする)。
colony = AntColonyTSP(dist, n_ants=n_ants, alpha=1.0, beta=5.0, rho=0.52, q=90.0, seed=1)
n_iter_demo = 55
snap_iters = {0, 14, 30, n_iter_demo - 1}
cum_best = math.inf
global_path: list[int] = []
hist_cum: list[float] = []
hist_paths_snap: list[list[int]] = []
for t in range(n_iter_demo):
b_l, b_p, _ = colony.iterate()
if b_l < cum_best:
cum_best = b_l
global_path = list(b_p)
hist_cum.append(cum_best)
hist_paths_snap.append(list(global_path))
if t in snap_iters:
fig = plot_state(
xy,
colony,
global_path,
title="辺の太さ ∝ フェロモン(灰色)/赤が累積ベスト順路",
iteration_label=f"反復 t = {t}(累積ベスト長 {cum_best:.3f})",
)
plt.show()
plt.close(fig)
show_best_tour_evolution_animation(
xy,
hist_paths_snap,
hist_cum,
interval_ms=260,
figsize=(6.0, 5.6),
repeat=True,
)
fig_curve, ax = plt.subplots(figsize=(6.0, 3.5))
ax.plot(range(1, len(hist_cum) + 1), hist_cum, color="#d7191c", lw=2.0, marker="o", ms=3, alpha=0.85)
ax.set_xlabel("反復 $t$(各ステップ終了後の累積ベスト)")
ax.set_ylabel("最短に更新されたツアー長")
ax.set_title("ステップごとの累積ベスト経路長(単調非増加)")
ax.grid(True, linestyle=":", alpha=0.5)
plt.tight_layout()
plt.show()
plt.close(fig_curve)
visited = np.zeros(n_node, dtype=bool)
visited[0] = True
_, axb = plt.subplots(figsize=(5.2, 2.8))
plot_decision_bar(colony, current=0, visited=visited, ax=axb)
plt.tight_layout()
plt.show()
demo()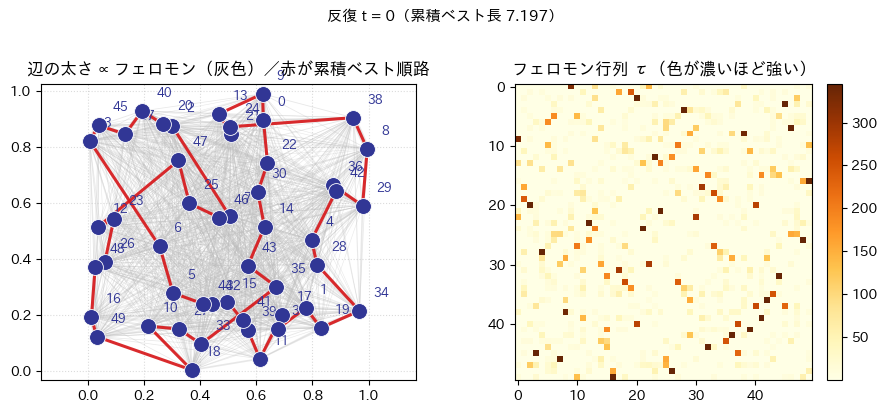
5. あとがき:パラメータと限界¶
を大きくすると 近い都市へ貪欲に寄る 傾向が強まり、局所解 に閉じ込められやすい。
が大きすぎると 記憶が消えるのが速く、有望な辺を保持しにくい。
本実装は 教科書レベルの AS に留めてある。大規模 TSP では MMAS や 局所探索とのハイブリッド などが実用で検討される。
典型文献として、Dorigo, Stützle, Ant Colony Optimization(MIT Press, 2004)などがある。
皆さんはどう思うだろうか? 同じ都市配置でも、乱数シードや を変えると、累積ベスト曲線の形が大きく変わるはずである。数式 (2) の 正規化 が、いつ 多峰性 を生み、いつ 一本化 されるかを意識してみると学びが深まる。
本ノート内の節へは §2(式) から辿れる(GitHub Pages 上の絶対 URL である)。
ACO と PSO の対照 と 同一 TSP での比較課題 は §6(対照)・§7(課題) にまとめる。
6. ACO と PSO の対照:何が違い、どちらが何に向くか¶
6.1 探索の仕組みの違い¶
粒子群最適化(PSO) は、各エージェントが 連続ベクトル空間上の位置と速度 をもち、自身のこれまでの最良位置と、群の最良位置へ引き寄せられる 速度の更新式 で動くモデルである。評価の良い領域へ探索が集まりやすいが、扱うのは 実数ベクトル である。
アリコロニー最適化(本ノートの Ant System) は、グラフ上で 未到達の都市へ進む離散選択 を繰り返して順路を構築する。試行の良さは 環境に共有されたフェロモン に反映され、次の試行の選好へ入る。記憶の置き場所が粒子の内部ではなく 辺に付いた行列 にある点が決定的である。
6.2 問題のタイプとの相性¶
順序やグラフ上の離散選択 が主となる問題には、モデル構造そのものが順路構築と一致する ACO が素直であり、順路という制約の扱いが実装にも移しやすい。
変数が実数ベクトルで、目的関数が連続的に評価できる 問題では、式の組み立てが簡潔な PSO が扱いやすいことが多い。離散のみの問題(本講義のような TSP)へ PSO を当てはめるときは、ベクトルを 順路に変換する表現の設計(例:Random Keys として を昇順に並べたときの順位が都市の訪問順となる)が別途必要になる。
6.3 長所と短所(一般論であり保証ではない)¶
| 観点 | PSO | ACO(Ant System 型) |
|---|---|---|
| 連続最適化 | 実装が軽く、軌道の可視化もしやすいことが多い | もともと連続目的関数向けではない |
| 離散・順路 | 表現の工夫が要る | 順路構築と素直に対応しうる |
| 記憶の形 | 粒子ごとの位置・ベスト | 共有のフェロモン(環境) |
| 弱みになりやすい点 | 局所解、パラメータ 依存、離散コード化で評価ランドスケープが読みにくくなりうる | パラメータ が多く、蒸発と堆積のバランスで早期収束や停滞が起きうる |
どちらが「優れている」かという問いに普遍の答えはない。比較するときは 定義域が連続か離散か、制約の扱いやすさ、チューニングの手間、得たい可視化 を軸に選ぶのがよい。群知能の枠組みの整理は 第4回・§2、PSO の式は §3 を参照せよ。
7. 課題:同一の TSP を ACO と PSO の両方で解く¶
次の手順で 同じ距離行列 に対し、Ant System(本ノート) と PSO のふるまいを比較せよ。
問題例の固定
都市数 (例:)と乱数シードを固定し、本ノートのdemoと同様に座標xyからユークリッド距離でdistをつくれ。ACO にはAntColonyTSPを用いてよい。PSO 側の表現
各粒子の位置 を、Random Keys により順路へ写像し、その巡回路の総距離を最小化する目的関数とせよ。すなわち、各都市 に実数キー を対応させ、キーの昇順に都市を並べた閉路の長さを評価する。PSO の速度・位置の更新は 第4回ノート の考え方に従い、次元 のループとして実装すればよい。比較する観点
反復回数や乱数の消費を可能な限り揃えたうえで、(a) 最良ツアー長の推移(ACO は反復ごとのベスト、PSO は反復ごとの群ベスト)、(b) おおよその計算時間、(c) パラメータを少し変えたときの安定性 を図と短い文章で報告せよ。提出
このノートにセルを追加する形でよい。コード・図・考察(目安として A4 で 1〜2 枚程度の文章量)を含むこと。